Multi-contact locomotion
Multi-contact locomotion
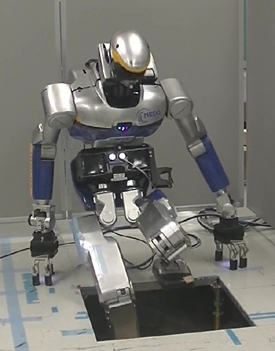
To move in environments more complex than those with flat floor, it is often necessary to use more than just the feet. Typically, we can use the hands, but also the elbows, knees, … to make contacts with the environment and help us move. This is called multi-contact locomotion. An important topic at JRL since its beginning is to develop the ability for humanoid robots to perform multi-contact locomotion. This research is done on the planning level (thinking in advance about the sequence of contact) and the control level (deciding in real-time how to move while the robot execute a sequence of contact), but also on the numerical algorithms needed for planning and control.